前回に引き続き、アナデバさんのモーションセンサー評価ボード(ADZS-BF707-BLIP2)の動作確認をしていきます。
前回は統合開発環境であるCrossCoreをインストールしました。これだけではまだ十分ではないので、周辺ソフトをインストールしていきます。
評価ボードのページに周辺ソフトのリンクがあります。このうち、下記のソフトをインストールしていきます。ダウンロードにはアナデバさんのユーザー登録が必要です。
ADVisionSensor Controller GUI
BLIP2 Board Support Package
USB Libraries from Closed Loop Design
Image Processing Toolbox, Blackfin
Video Occupancy Sensor, Blackfin
さて、インストールが終わったらボードの動作確認をしていきます。
ボードにはUSBポートが2つあります。1つはUSBミニBコネクタ(USB To UART)で、もう1つはUSBマイクロBコネクタ(USB0) ですが、両方ともPCのUSBポートに接続します。
そして、ADVisionSensorControllerのGUIプログラムを起動させます。
なぜか1回目は認識せず。ボードをリセットしプログラムを再起動させます。
すると、カメラデバイスを選択してくれと表示されるので、Aptinaを選択してSubmitボタンを押します。
するとカメラ画像が表示されます。とりあえず手元にあったドクターイエローの模型が映っていますw
ちゃんと動作しているようです。
さて、このボードのファームウェアをアップデートしないといけません。目的は
SPI通信(シリアル・ペリフェラル・インターフェース)ポートの有効化です。このボードのデータをマイコン等に取り込むためのインターフェースとしてSPIを使用するつもりですが、デフォルトで載ってるファームウェアはSPIが使えません。そこでSPI対応のファームウェアに載せ替えることにします。
ファームウェアを書き換えるためには、ICE1000のJTAGエミュレータボードを接続します。
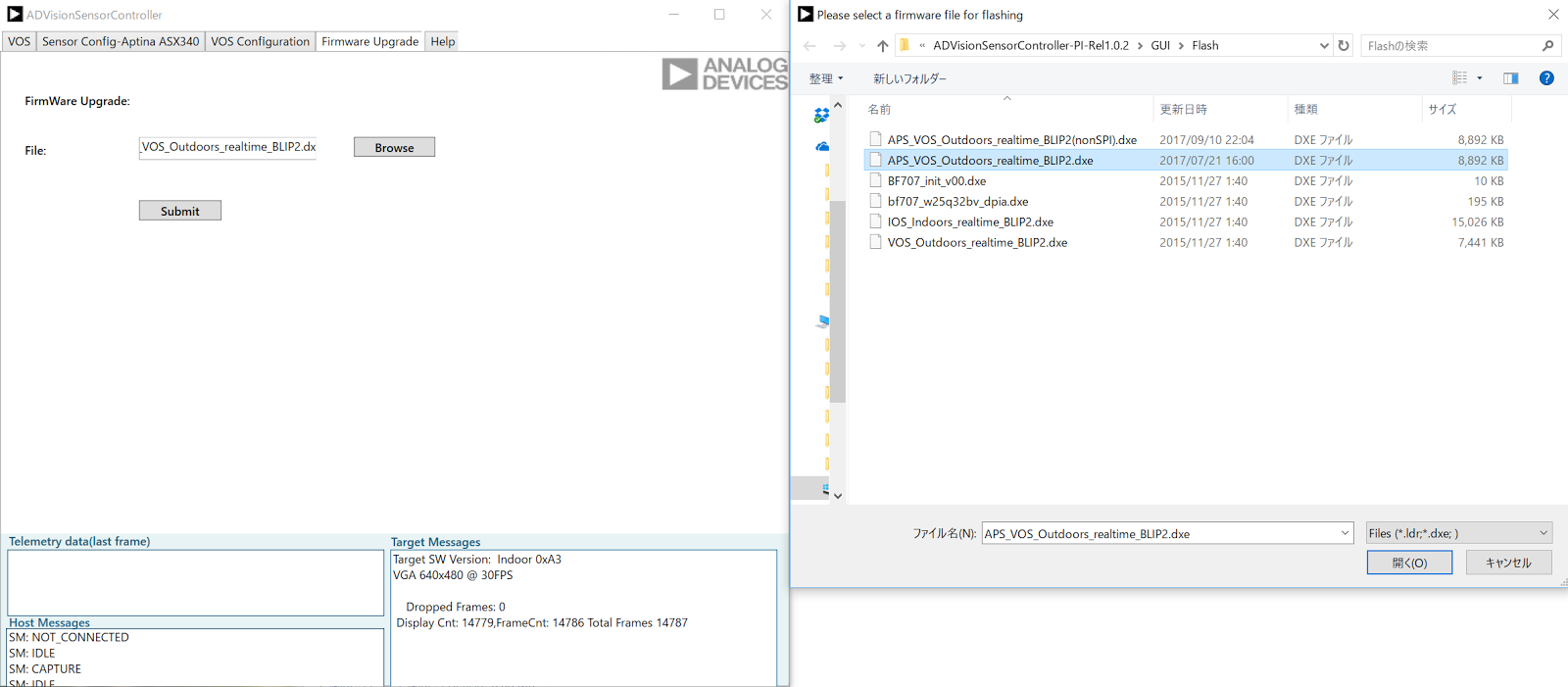
そして、ADVisionSensorControllerのGUIプログラムからファームウェアのタブを選択し、目的のファームウェアのバイナリファイルを選んで実行します。
すると、なんてことでしょう(笑)。
DOS窓でエラー発生。実行しようとしているコマンドのパスをよく見たら、CrossCore Embedded Studioのバージョン指定が違っています。つまり、ADVisionSensorControllerのGUIプログラムが想定してるバージョンより新しいものがインストールされているのですが、追従できず古いバージョンを呼ぼうとしていました。
---
インストール済のCrossCore Embedded Studioは、Ver.2.6.0
GUIプログラムが想定してるCrossCore Embedded Studioは、Ver.2.1.0
---
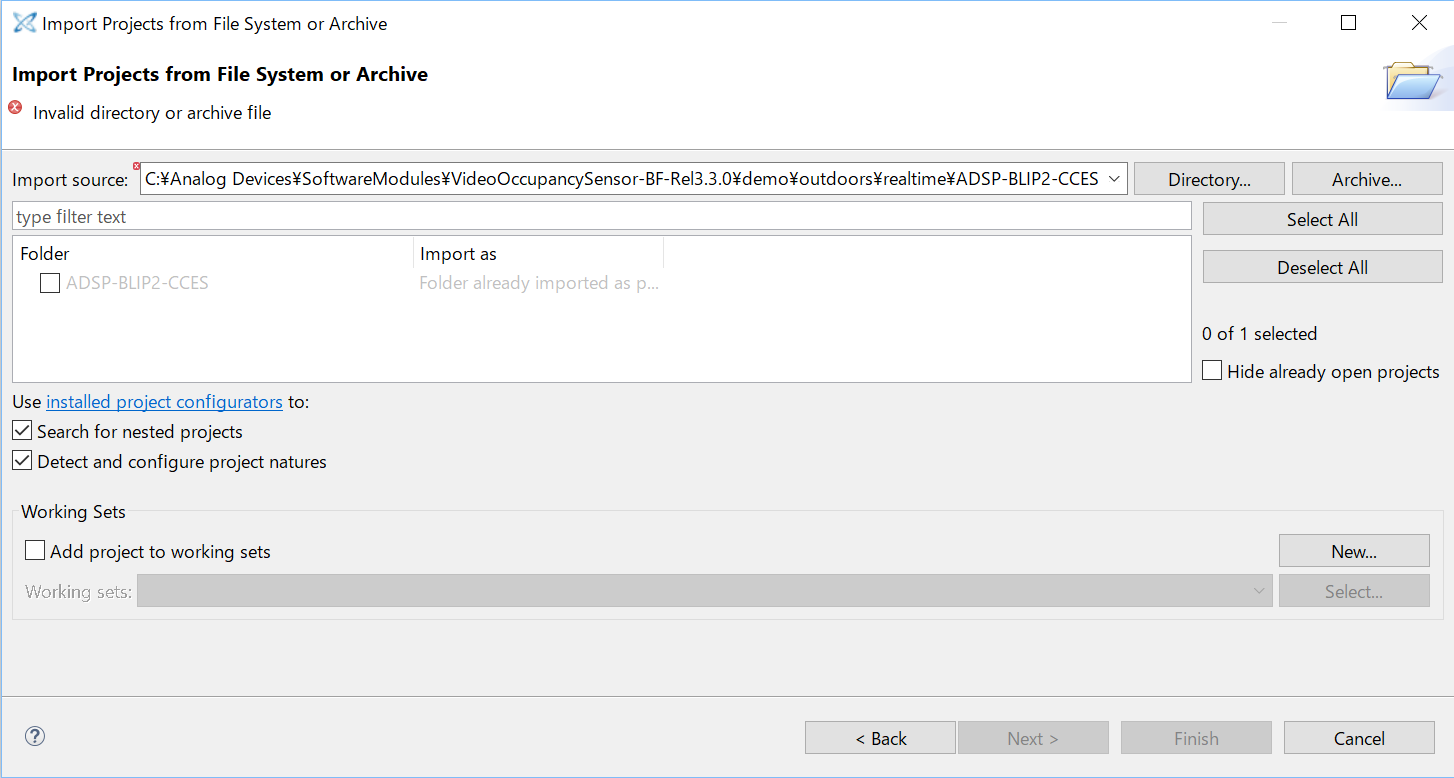
そこで、ADVisionSensorControllerのGUO\ConfigFiles\GeneralConfigurations.xmlを書き換えます。
差分はこんな感じ
C:\Analog Devices\SoftwareModules\ADVisionSensorController-PI-Rel1.0.2\GUI\ConfigFiles>
fc GeneralConfigurations.OLD.xml GeneralConfigurations.xml
ファイル GeneralConfigurations.OLD.xml と GENERALCONFIGURATIONS.XML を比較しています
***** GeneralConfigurations.OLD.xml
<DumpTargetMessages>0</DumpTargetMessages>
<CCES_version>2.1.0</CCES_version>
<SensorProfiles>
***** GENERALCONFIGURATIONS.XML
<DumpTargetMessages>0</DumpTargetMessages>
<CCES_version>2.6.0</CCES_version>
<SensorProfiles>
*****
書き直した後、再びファームウェアのアップデートを実行します。
アップデートが無事進行しています。よかったよかった。
よく見たら、「ボードとのUSB接続が切れたので、プログラムを再起動させて再接続するよ」ってダイアログが出てます。これは、ファームのアップデートが終了したらOKを押しましょう。今押したらプログラムが落ちてしまいます。
無事完了しました。先ほどのダイアログのOKを押してプログラムを再起動します。
今回は動作確認とファームウェアのアップデートを行いました。
次回はマイコンと実際に接続してみようと思います。
すみません、まだ事前準備編が続きます。(追記9/14)
ーーー
応援クリックをお願いします!